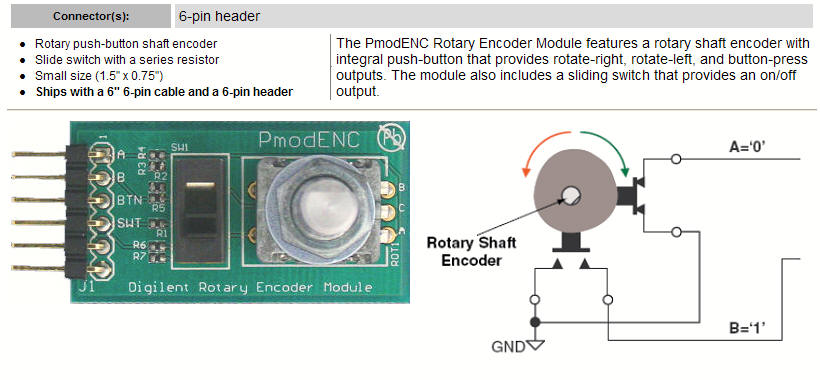
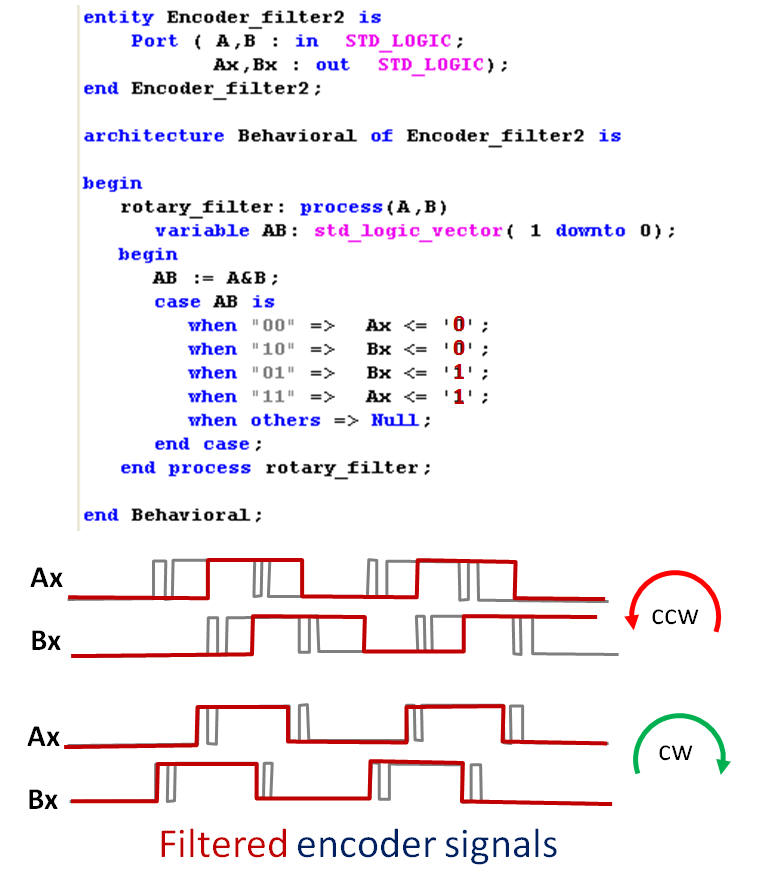
In real-life encoders,
specially the ones based at mechanic switches, will
bouncing appears each time a switch open and closes.
(*)By using the fact
that one signal always stable while the other
changes states can a simple filter be constructed.
However must we accept some
form of delay at least in one direction of turns.
There's also a chance /
risk that pulses could be last. which could course
problems in some applications.
(*) Due to the laws of
Murphy will this not happen if you actually wants'
it :-)